Công cụ chọn động cơ > Cửa/cổng
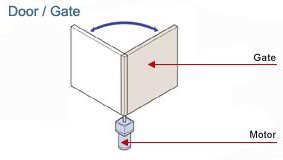
Công cụ tính toán kích thước cửa/cổng
Các yêu cầu ước tính như sau. Vui lòng liên hệ 0398 828 669 (hoặc email nguyentrongbac.com@gmail.com) để được hỗ trợ hoặc giải đáp thắc mắc. để được hỗ trợ hoặc tư vấn.
Để in báo cáo tính toán, nhấn vào
Báo cáo đầy đủ
Để xem các mẹo lựa chọn động cơ, nhấn vào
Hướng dẫn
 Print
Print
Chuyển đổi đơn vị
Chúng tôi sẵn sàng hỗ trợ
![]()
Giờ làm việc:
Thứ Hai đến Thứ Sáu
Giờ hành chính
Bán hàng & Hỗ trợ khách hàng:
Nguyễn Trọng Bắc
Phone: 0398 828 669
Hỗ trợ kỹ thuật:
Nguyễn Trọng Bắc
Email: nguyentrongbac.com@gmail.com